提供整体锂电设备解决方案
电池整套实验设备生产制造企业
热情欢迎您来电咨询电池设备相关问题!
咨询电话:400-027-6118
咨询电话:400-027-6118
Product center
> 您当前的位置: 主页 > 产品中心 > 电池实验设备(按应用分) > 锂电中试线设备 >

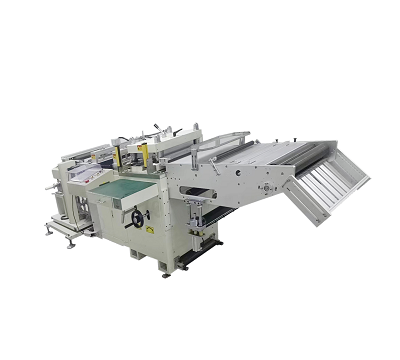
全自动叠片机
| GRS-147A-100/200/400 设备主要功能: 本机用于实现锂离子动力电池、超级电容器方形极片的叠片,主要用于大型动力电池电芯叠片工艺的自动化设备,将锂电芯的正负极片与隔膜做Z型叠片 |
| 项目 | 100型 | ||
|
材料 规格 |
极片 | 正极长度/公差(mm) | 30~60 |
| 正极宽度/公差(mm) | 50~100 | ||
| 负极长度/公差(mm) | 30~60 | ||
| 负极宽度/公差(mm) | 50~100 | ||
| 正极厚度(mm) | 0.05-0.3mm | ||
| 负极厚度(mm) | 0.05-0.3mm | ||
| 隔膜 | 宽度(mm) | 负极宽度+3mm | |
| 厚度(µm ) | 25 | ||
| 最大外径(mm) | φ250 | ||
| 纸筒内径(mm) | 3" | ||
| H电芯厚度(mm) |
| 5-10 |
| 项目 | 技术参数 | |
|
技术参数 |
叠片速度(S/片) | 1.5S/片-2.5S/片 |
| 极片与隔膜间叠合精度(纵向) | 中心偏差小于0.3mm(纵向) | |
| 极片间对位精度 | 中心偏差小于0.3mm | |
| 隔膜间对位精度 | 端面对齐偏差小于0.3mm | |
| 单片对齐精度 | ±0.5mm; | |
| 极片整体对齐精度 | ±0.5mm | |
| 夹具宽度可调范围 | 0-20mm(可调) | |
| 辅助时间(S) | 15-25 | |
| 叠片数量 | 可设定 | |
| 叠片方式 | Z型方式 | |
| 真空吸附 | 真空吸盘 | |
| 总功率(kw) | 3KW | |
| 工作环境 | 电源 | AC220V 单相;电压波动小于±10%; |
| 压缩空气 | 0.4~0.6Mpa(4-6kgf/cm) | |
| 耗气量 | 230L/MIN | |
| 真空量 | 10L/S | |
| 压力露点(干湿程度) | 3级(-20℃) | |
| 残余含尘量 | 1 级:0.1mg/m3(对应粒径为0.1um) | |
| 残余含油量 | 2 级:0.1 mg/m3 | |
| 环境温度 | 20~35℃ | |
| 相对湿度 | 5~55%HR | |
| 环境洁净度 | 不低于10万级,现场无腐蚀性气体、液体、爆炸性气体 |

...

...

除湿机组及洁净房现场施工图...
| 欢迎咨询服务热线: | 电子邮箱:[email protected] |
| 400-027-6118 | 详细地址:武汉东湖新技术开发区光谷大道3号 |
© 2017 2024新澳门原料免费 版权所有 备案号:鄂ICP备18001426号-1